Файл:Gaussianprocess posteriorMeanNoise.svg
Перейти до навігації
Перейти до пошуку

Розмір цього попереднього перегляду PNG для вихідного SVG-файлу: 360 × 180 пікселів. Інші роздільності: 320 × 160 пікселів | 640 × 320 пікселів | 1024 × 512 пікселів | 1280 × 640 пікселів | 2560 × 1280 пікселів.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Повна роздільність (SVG-файл, номінально 360 × 180 пікселів, розмір файлу: 27 КБ)
| Відомості про цей файл містяться на Вікісховищі — централізованому сховищі вільних файлів мультимедіа для використання у проектах Фонду Вікімедіа. |
{kind=link}
Опис файлу
| Опис |
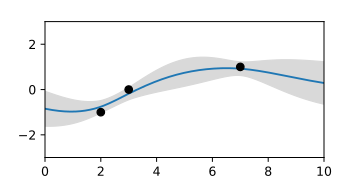
English: Posterior gaussian process with input noise visualized with posterior mean and confidence interval |
| Час створення | |
| Джерело | Власна робота |
| Автор | Physikinger |
| SVG розвиток | Вихідний код цього SVG-файлу правильний. Це векторне зображення було створено з допомогою Matplotlib |
| Сирцевий код | Python code#This source code is public domain
#Author: Christian Schirm
import numpy, scipy.spatial
import matplotlib.pyplot as plt
def covMat(x1, x2, covFunc, noise=0): # Covariance matrix
cov = covFunc(scipy.spatial.distance_matrix(numpy.atleast_2d(x1).T, numpy.atleast_2d(x2).T))
if noise: cov += numpy.diag(numpy.ones(len(cov))*noise)
return cov
def interpol(x_known, y_known, x_unknown, covFunc, noise=0, sigmaPrior=1):
Ckk = covMat(x_known, x_known, covFunc)
Cuk = covMat(x_unknown, x_known, covFunc, noise=0)
y_unknown = numpy.dot(Cuk, numpy.dot(numpy.linalg.inv(Ckk), y_known))
CkkInv = numpy.linalg.inv(Ckk)
sigma_unknown = numpy.sqrt(sigmaPrior * sigmaPrior - numpy.diag(numpy.dot(Cuk, numpy.dot(CkkInv, Cuk.T))))
return y_unknown, sigma_unknown
covFunc = lambda d: numpy.exp(-(d**1.9/8.)) # Covariance function
x_known = numpy.array([2,3,7])
y_known = numpy.array([-1,0,1])
x_unknown = numpy.linspace(0, 10, 300)
y_unknown, sigma_unknown = interpol(x_known, y_known, x_unknown, covFunc)
Ckk = covMat(x_known, x_known, covFunc, noise=0.1)
Cuu = covMat(x_unknown, x_unknown, covFunc, noise=0.00)
CkkInv = numpy.linalg.inv(Ckk)
Cuk = covMat(x_unknown, x_known, covFunc, noise=0.0)
m = 0 #numpy.mean(y)
covPost = Cuu - numpy.dot(numpy.dot(Cuk,CkkInv),Cuk.T)
y_unknown = numpy.dot(numpy.dot(Cuk,CkkInv),y_known)
fig = plt.figure(figsize=(4.0,2))
plt.plot(x_unknown, y_unknown, label=u'Prediction')
sigma = numpy.sqrt(numpy.diag(covPost))
plt.plot(x_known, y_known,'ko')
plt.fill_between(x_unknown.ravel(), y_unknown - sigma, y_unknown + sigma, color = '0.85')
plt.axis([0,10,-3,3])
plt.savefig('Gaussianprocess_posteriorMeanNoise.svg')
|
{kind=link}
Ліцензування
Я, власник авторських прав на цей твір, добровільно публікую його на умовах такої ліцензії:
| Цей файл доступний на умовах Creative Commons CC0 1.0 Universal Public Domain Dedication. | |
| Особа, що пов'язала роботу з даною дією, передала роботу у суспільне надбання шляхом відмови від усіх своїх прав на роботу по всьому світу по закону про авторське право, включаючи всі пов'язані і суміжні права, в тій мірі, що допускається законом.
Ви можете копіювати, змінювати, розповсюджувати і виконувати роботу, навіть на комерційній основі, не питаючи дозволу. |
Історія файлу
Клацніть на дату/час, щоб переглянути, як тоді виглядав файл.
| Дата/час | Мініатюра | Розмір об'єкта | Користувач | Коментар | |
|---|---|---|---|---|---|
| поточний | 21:56, 21 серпня 2017 | | 360 × 180 (27 КБ) | Physikinger | User created page with UploadWizard |
Використання файлу
Така сторінка використовує цей файл:
Глобальне використання файлу
Цей файл використовують такі інші вікі:
- Використання в de.wikipedia.org
- Використання в en.wikibooks.org
{kind=link}