Кінематична пара
| Кінематична пара | |
| |
Кінемати́чна па́ра — рухоме сполучення двох жорстких (твердих) ланок, що накладає обмеження на їх відносний рух умовами накладеної в'язі. Кожна з умов в'язі усуває один ступінь свободи, тобто можливість одного з 6 незалежних відносних рухів у просторі. В прямокутній системі координат можливі 3 поступальних рухи (в напрямку 3-х осей координат) і 3 обертальних (навколо цих осей).
Класифікація кінематичних пар[ред. | ред. код]
За числом умов в'язей S у теорії машин і механізмів кінематичні пари поділяються на 5 класів. Число ступенів свободи кінематичної пари W = 6 — S. У кожному класі кінематичні пари поділяються на види за можливими видами відносного руху ланок.
За видом контакту між ланками кінематичні пари поділяються на:
- вищі (контакт у точці або по лінії);
- нижчі (контакт по поверхні).
| Клас | Число в'язей |
Число ступенів свободи |
I вид | II вид | III вид | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| p1 | число рухів | обертальних | поступальних | ||||||||
| вільних | |||||||||||
| зафіксованих | |||||||||||
| p2 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | |||||
| вільних | вільних | ||||||||||
| зафіксованих | зафіксованих | ||||||||||
| p3 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | ||
| вільних | вільних | вільних | |||||||||
| зафіксованих | зафіксованих | зафіксованих | |||||||||
| p4 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | |||||
| дозволених | дозволених | ||||||||||
| зафіксованих | зафіксованих | ||||||||||
| p5 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | ||
| дозволених | дозволених | дозволених | |||||||||
| зафіксованих | зафіксованих | зафіксованих | |||||||||
Приклади реалізації кінематичних пар[ред. | ред. код]
Обертальна пара — клас 5, допускає лише відносний обертальний рух ланок навколо осі. Ланки пари стикаються по циліндричній поверхні, отже, це нижча пара, замкнута геометрично. Роль такої кінематичної пари виконує і складніша конструкція - підшипник кочення.
Поступальна пара — клас 5, з геометричним замиканням, нижча, допускає лише прямолінійний поступальний відносний рух ланок.
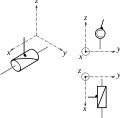
Циліндрична пара — клас 4, з геометричним замиканням, нижча, допускає незалежний обертальний і поступальний відносний рух ланок.
Сферична пара — клас 3, з геометричним замиканням, нижча, допускає три незалежні відносні обертання ланок навколо осей x, y, z.
Сферична пара з пальцем — клас 4, з геометричним замиканням, нижча, допускає два незалежні відносні обертання ланок навколо осей, що визначаються прорізом і пальцем (доданим до сферичної пари).
Гвинтова пара — клас 5, з геометричним замиканням, нижча, допускає відносний гвинтовий рух ланок з постійним кроком. Кутові і лінійні переміщення ланок гвинтової пари мають однозначну відповідність, внаслідок чого залишається тільки один ступінь свободи.
Плоска пара — клас 3, циліндр-площина — 2 клас і сфера-площина — 1 клас, пари використовують силове замикання, причому перша з них нижча, а дві інші вищі. Ці пари практично не застосовуються в реальних механізмах і описані в цьому огляді для повноти представлення класифікації кінематичних пар.
Зв'язана система кінематичних пар утворює кінематичний ланцюг, на основі якого реалізуються механізми.
-
 Обертальна пара
Обертальна пара -
 Поступальна пара
Поступальна пара -
 Циліндрична пара
Циліндрична пара -
 Сферична пара
Сферична пара -
 Сферична пара з пальцем
Сферична пара з пальцем -
 Гвинтова пара
Гвинтова пара -
 Плоска пара
Плоска пара -
 Сфера-площина
Сфера-площина








Джерела[ред. | ред. код]
- Кіницький Я. Т. Теорія механізмів і машин:Підручник .-К.: Наукова думка, 2002.- 660 с. — ISBN 966-00-0740-Х
- Кореняко О. С. Теорія механізмів і машин:Навчальний посібник/За ред. Афанасьєва М. К.-К.: Вища школа, 1987.- 206 с.
- Артоболевский И. И. Теория машин и механизмов. М.: Наука, 1988.
- Попов С.В., Бучинський М.Я., Гнітько С.М., Чернявський А.М. Теорія механізмів технологічних машин: підручник для студентів механічних спеціальностей закладів вищої освіти. Харків: НТМТ, 2019. 268 с.
Дивись також[ред. | ред. код]
Механізм
Машина
Кінематичний ланцюг
Принципова кінематична схема