Система кермування

Система кермування, кермове керування, рульове керування, кермове управління — сукупність елементів для спрямування руху транспортного засобу в бажаному напрямку за допомогою кермового колеса (кермування). Його механізми перетворюють положення (кут повороту) керма на пропорційну зміну положення коліс чи аналогічних елементів керування рухом (лиж, ковзанів, котків).
Деякі види траспортних засобів використовують замість системи кермування бортовий поворот — передачу обертального моменту тільки на один борт. Така система застосовується на транспортних засобах з гусеничним рушієм, а також на колісній бронетехніці.
Пристрої для повороту застосовувалися ще на упряжних транспортних засобах (кінних і волячих возах, екіпажах). Для полегшення повертання повозу в потрібну сторону передній насад (міст) робили рухомим (коловоріт на насаді)[1], з'єднуючи його з рамою шворнем. До переднього насаду кріпився дишель (у центрі) чи голоблі (по краях), які запряжка коней повертала в тій чи інший бік, а дишель (голоблі) повертав насад з передньою віссю.

Проте, система з рухомим переднім насадом на шворні мала ту незручність, що колеса знаходилися на однаковій відстані від шворня і їхня площина була завжди перпендикулярна осі, у той час як при повороті зовнішнє колесо проходить дугу більшого радіусу, ніж внутрішнє. Це приводило до того, що колеса на поворотах ковзали своїми шинами по дорозі[2]. Окрім того, кузов спирався на три точки (два задні колеса й один передній шворінь) і тому був нестійким, а передок через застосування центрального шворня мусили робити високим[3]. У 1817 році німецький каретник Георг Ланкеншпергер винайшов систему в'язей, що розв'язувала цю проблему. Запатентований цей механізм був його англійським агентом Рудольфом Аккерманом у 1818 році, тому часто йменується кермовою трапецією Аккермана. Можливо, ідея виникла ще раніше: на роль першовідкривача може претендувати Еразм Дарвін, що запропонував таке вдосконалення екіпажів у 1758 році[4].
Вісь задніх коліс була жорстко закріплена, тому центр кола повороту знаходився на лінії, проведеній від задньої осі. Необхідно було добитися, що внутрішнє колесо відхилялося при повороті на більший кут, ніж зовнішнє[2], для чого були застосовані два шворні ближче до маточин. Хоча ця схема була складнішою порівняно з одношворневою, вона покращила керованість екіпажем, оскільки впливи від нерівностей дорожнього покриття вже не докладалися до довгого плеча важеля осі та зменшилося поздовжнє переміщення керованих коліс. В'язі утворюють не паралелограм, а трапецію: довжина кермової поперечної тяги менша, ніж довжина осі, таким чином, важелі поворотних кулаків мають зворотне сходження. Це забезпечує більший кут відхилення внутрішнього колеса при повороті[2], повертаються тільки поворотні кулаки на шворнях, сама ж передня вісь (балка) залишається нерухомою. Якщо кермова тяга встановлюється перед передньою віссю, вона робиться довшою за неї, отже, зворотне сходження зберігається. Ця система підвищила сталість екіпажа, оскільки спереду кузов спирався вже на два шворні. Дишель кріпився до екіпажа у двох точках: кінцем до поперечної тяги, і до осі-балки[3]. Поворот дишля викликав переміщення його заднього кінця в протилежний бік, зміщення тяги і поворот кулаків з маточинами коліс. Від кінних екіпажів кермова трапеція перейшла і до перших автомобілів. Проте, на триколісному Benz Patent-Motorwagen 1886 року, що вважається першим в світі автомобілем, кермова трапеція була відсутня: вертикальна колонка з корбою з'єднувалася поздовжньою тягою з велосипедною вилкою, у якій було укріплене єдине переднє колесо.
Для передачі моменту сили до кермових тяг спочатку використовувалися поздовжні тяги від вертикальної колонки (на найраніших автомобілях нагорі її замість кермового колеса встановлювалася корба з 1-2 ручками), з появою керма з похилою колонкою узвичаюється черв'ячна передача (у Військовій енциклопедії Ситіна 1911—1915 рр. описується кермовий апарат з трапецією Аккермана і черв'ячним механізмом, мало відрізнюваним від вживаного у другій половині XX ст.)[5].
-
 Система повороту воза на одному шворні
Система повороту воза на одному шворні -
 Система кермування Benz Patent-Motorwagen, 1886 рік.
Система кермування Benz Patent-Motorwagen, 1886 рік. -
 Кермова система автомобіля Benz Velo, 1895 рік.
Кермова система автомобіля Benz Velo, 1895 рік. -
 Анімація відхилення коліс при повороті транспортного засобу з трапецією Аккермана
Анімація відхилення коліс при повороті транспортного засобу з трапецією Аккермана

_IMG_0850.jpg)
.jpg)

Для повороту колісних транспортних засобів може використовуватися один з чотирьох способів: поворот керованої балки, поворот керованих коліс, поворот зміною кута зчленування піврам, бортовий поворот.
При повороті керованих осей (візків) повертається на одному шворні вся вісь. Такий спосіб є найбільш архаїчним, він вживався на кінних возах і екіпажах.
-
 Рухома верхня частина переднього насаду («коловоріт») воза на шворні
Рухома верхня частина переднього насаду («коловоріт») воза на шворні -
 Снасть воза зі шворнем для коловорота
Снасть воза зі шворнем для коловорота -
 Передній насад тарантаса
Передній насад тарантаса -
 Система кермування автомобіля Clement-Panhard (1899) з єдиним шворнем.
Система кермування автомобіля Clement-Panhard (1899) з єдиним шворнем.





Є звичайним способом повороту на легкових і більшості вантажних автомобілів. Здійснюється зміною кута положення коліс відносно балки. Колеса закріплені на поворотних кулаках, встановлених кінцях балки за допомогою цапф (шворнів). Задні кінці кулаків з'єднані тягою (системою тяг), яка разом з балкою і важелями цапф (поворотними кулаками) утворює кермову трапецію. Кермова трапеція може бути нерозрізною — зі суцільною кермовою тягою, і розрізною — з багатоланковою кермовою тягою, що застосовується на автомобілях з незалежною підвіскою. Завдяки більшому куту повороту внутрішніх керованих коліс порівняно із зовнішніми, уникається їхнє ковзання, а наявність диференціала допомагає уникнути ковзання й некерованих коліс.
Залежно від розташування керованих коліс розрізняють поворот колесами передньої осі, колесами задньої осі та колесами двох осей.
Деякі види транспортних засобів мають керований задній міст. До них належать, наприклад, вилочні навантажувачі, операторські візки, ранні моделі кар'єрних навантажувачів, триколісний автомобіль Dymaxion інженера Річарда Фуллера, надшвидкісний Thrust SSC[6].
Задньоколісне кермування схильне до несталості, надмірної повертаємості (зменшенню радіусу повороту). Використовують його на транспортних засобах з малою швидкістю, але підвищеними вимогами до маневрованості у вузьких просторах (наприклад, на складській техніці).

Чотириколісне кермування (також відоме як 4WS, від англ. 4 Wheel Steering) — система кермування колесами зразу двох мостів. Застосовується для підвищення реакції кермувальної системи («відчуття керма») на високій швидкості чи зменшення радіусу повороту на низькій. Залежно від способу повертання коліс заднього моста розрізняють активне і пасивне чотириколісне кермування.
При активному чотириколісному кермуванні поворотом керма повертаються чотири колеса. На чотириколісних автомобілях таким чином керованими є всі колеса, на автомобілях з 3-4 осями керованими можуть бути передній і задній мости (наприклад, на зчленованих автобусах), або перший і другий (важкі вантажівки). У більшості систем чотириколісного кермування задні колеса повертаються з допомогою комп'ютера й виконавчого механізму (актуатора)[7]. Як правило, задні колеса не можуть повертатися на такі ж кути, що й передні. У системі можуть бути передбачені відключення керування задніми колесами і функція незалежного повертання передніх і задніх коліс. На низьких швидкостях (напр., при паркуванні) задні колеса повертаються зворотно переднім, зменшуючи радіус повороту, що особливо важливо для великих пікапів, тракторів, автомобілів з причепами і легкових автомобілів з широкою колісною базою, у той час як на великих швидкостях передні і задні колеса повертаються однаково (що забезпечується електронним керуванням), щоб транспортний засіб міг змінити положення з меншим кутом рискання і ефективнішим нарощуванням бічного прискорення, покращуючи поздовжню сталість[7][8].
Різновид активного чотириколісного кермування — так зване «крабове» кермування. При ньому всі керовані колеса повертаються в одному напрямку і на один кут. Застосовується у випадках, коли автомобілю треба проїхати по прямій, але під кутом до діаметральної площини автомобіля (при переміщенні вантажів штабелером, при зйомці з операторського візка), або для того, щоб уникнути проїзду задніх коліс колією передніх (при обробці ґрунту сільськогосподарською технікою).
-
 Mercedes-Benz Type G 5 1937 року з чотириколісним кермуванням
Mercedes-Benz Type G 5 1937 року з чотириколісним кермуванням -
 Поворот передніх керованих мостів вантажівки Mercedes-Benz Actros
Поворот передніх керованих мостів вантажівки Mercedes-Benz Actros -
 Крабове кермування телескопічним навантажувачем
Крабове кермування телескопічним навантажувачем -
 Крабове кермування котком
Крабове кермування котком -
 Крабове кермування розбризкувачем рідких добрив
Крабове кермування розбризкувачем рідких добрив





Багато сучасних автомобілів мають системи з пасивним керуванням задніми колесами. На багатьох транспортних засобах при повороті задні колеса мають схильність злегка вирулювати у зовнішній бік повороту, що зменшує сталість. Для протидії цій тенденції і спрямовання коліс злегка до внутрішньої сторони система пасивного кермування використовує поперечні сили, що виникають при повороті (через геометрію підвіски) та сайлентблоки. Типовими методами для досягнення цього ефекту (так званого «піддатливого недоповороту») є застосування механізму Ватта на ведучій задній осі або використовування сайлентблоків у керуванні сходженням на автомобілях з півнезалежною підвіскою. На автомобілях з незалежною підвіскою це досягається регулюванням гумових сайлентблоків підвіски.
Поворот зміною кута зчленування піврам (складанням силових ланок) використовується в тих випадках, коли колеса транспортного засобу мають великі розміри, тому їхній поворот утруднений (наприклад, на важких колісних тракторах, одновісних тягачах, дорожній техніці, всюдиходах). Рама такого транспортного засобу складається з двох частин (піврам чи силових ланок), на яких укріплені передній і задній мости. Обидві піврами з'єднуються вертикальним шворнем, відносний їхній поворот здійснюється за допомогою гідравлічних циліндрів кермової системи. Недоліками цього способу є низька точність керування при великих швидкостях, складність розміщення кабіни й обладнання на рухомих піврамах, надмірна складність трансмісії.
Транспортні засоби з кількох рухомо зчленованих ланок, у яких кермування здійснюється традиційним поворотом коліс (зчленовані автобуси і тролейбуси, тягачі з напівпричепами, автопоїзди тощо) можуть розглядатися як машини з пасивним складанням силових ланок.
-
 Поворот піврам трактора «Кіровець»
Поворот піврам трактора «Кіровець» -
 Ківшевий навантажувач з кермуванням зміною кута зчленування піврам
Ківшевий навантажувач з кермуванням зміною кута зчленування піврам -
 Механізм повороту одновісного тягача
Механізм повороту одновісного тягача -
 Поворот зчленованого автобуса зміщенням передніх і задніх коліс з одночасним пасивним поворотом ланок на шворні
Поворот зчленованого автобуса зміщенням передніх і задніх коліс з одночасним пасивним поворотом ланок на шворні -
 Поворот автопоїзда з двома причепами
Поворот автопоїзда з двома причепами



_CVL3215_@_Caltex_Kwinana_(Jackknifed,Nearside).jpg)
.jpg)
Бортовий поворот (диференціальне кермування) полягає в зміні крутного моменту рушія тільки з одного борту, що здійснюється використовуванням диференціала. Використовується переважно на транспортних засобах з гусеничним рушієм. На колісних машинах вживається вкрай рідко, бо такі повороти супроводжуються сильною деформацією шин, підвищеним їх зношенням. Може використовуватися разом з поворотом керованих коліс (однієї чи обох осей).
На деяких транспортних засобах може використовуватися поєднання двох систем повороту: на деяких навантажувачах диференціальне кермування поєднується з кермуванням поворотом коліс, на автомобілях з напівгусеничним рушієм для коліс використовується кермування поворотом, для гусениць — диференціальне (спрощені варіанти не мали диференціального керування гусеницями).

Система кермування складається з таких елементів:
- Кермове колесо (кермо) — слугує для передачі крутного моменту системі кермування, а також як спосіб зворотного зв'язку.
- Кермова колонка — проміжна ланка між кермовим колесом і кермовим механізмом. На неї може кріпитися система безпеки, замок запалювання, важелі увімкнення склоочисників та поворотників.
- Кермовий механізм — перетворює поворот кермового колеса в рух кермових тяг.
- Кермові тяги (кермовий привод) — стрижні з наконечниками і важелями, які повертають поворотні кулаки передніх коліс і відхиляють їх на потрібний кут.
-
 Кермова трапеція Аккермана
Кермова трапеція Аккермана -
 Трапеція з передачею через важіль-гойдалку
Трапеція з передачею через важіль-гойдалку -
 Трапеція з рейковою передачею
Трапеція з рейковою передачею -
 Трапеція з короткою рейковою передачею
Трапеція з короткою рейковою передачею



Основна мета кермування — забезпечити поворот коліс у потрібному напрямку. Це досягається низкою тяг, важелів, шворнів і зубчастих передач. Одним з фундаментальних положень є так званий кастор — кожне колесо спрямовується розташованою перед ним точкою повороту, це сприяє самоцентруванню системи кермування в напрямку руху.
В'язі, що з'єднують коробку кермувого механізму з колесами, зазвичай утворюють одну з конфігурацій трапеції Аккермана, беручи до уваги той факт, що під час повороту внутрішнє колесо насправді проходить шлях меншого радіусу, ніж зовнішнє, отже кут сходження для їзди по прямій відрізняється від такого для поворотів. Кут коліс у вертикальній площині також впливає на динаміку кермування, впливають на неї і шини.

Багато сучасних автомобілів використовують рейкові кермувальні механізми. Кермове колесо повертає шестірню, та переміщає кремальєру-рейку, перетворюючи таким чином обертальних рух у поступальний у напрямку вздовж керованої осі. Крутний момент передається на кульові поворотні шарніри (що замінили колишні шворні) через поперечні тяги і кермувальний важіль.
Переваги рейкового механізму — високий ступінь зворотного зв'язку та безпосереднє «відчуття керма». Недоліком є те, що він погано піддається регулюванню, і у випадку зношення і прогресування люфтів єдиним виходом є повна заміна всього механізму.
Компанія BMW почала використовувати рейковий механізм у 1930-х роках, ця технологія була перейнята і іншими європейськими виробниками. Американські автовиробники почали використовування рейкового механізму з моделі Ford Pinto, випущеної в 1974 році.
-
 Рейковий механізм PSS (прогресивної безпечної системи кермування)
Рейковий механізм PSS (прогресивної безпечної системи кермування) -
 Робота рейкового механізму PSS
Робота рейкового механізму PSS



У цій системі кермування використовується черв'ячна передача: кермова колонка має на кінці гвинт-черв'як, що приводить у рух сектор (ролик) вала кермової сошки[en]. У варіанті з розрізною поперечною тягою (при незалежній підвісці передніх коліс) сошка з'єднана з боковою тягою лівого колеса, окрім того, середня (проміжна) тяга сполучує її з маятниковим важелем, приєднаним до бокової тяги правого колеса. Варіант з цільною тягою включає в себе приєднану до сошки поздовжню тягу, з'єднану з поворотною цапфою одного з коліс, і поперечну тягу, з'єднану через два кермові важелі з цапфами[9][10]. Залежно від способу передачі моменту з черв'яка на сошку розрізняють черв'ячно-секторні і черв'ячно-роликові механізми.
Колись поширений, цей тип кермового механізму вважається зараз застарілим.
-
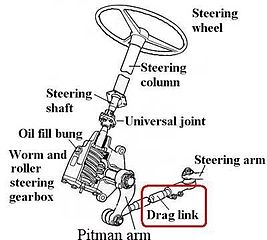 Система з черв'ячно-роликовим механізмом: Pitman arm — кермова сошка, Drag link — бокова тяга, Steering arm — поворотний кулак
Система з черв'ячно-роликовим механізмом: Pitman arm — кермова сошка, Drag link — бокова тяга, Steering arm — поворотний кулак -
 Кермова сошка, поздовжня тяга і поворотний кулак трактора Kramer
Кермова сошка, поздовжня тяга і поворотний кулак трактора Kramer



Гвинтово-гайковий механізм схожий на черв'ячний, але замість черв'яка використовується гвинт, що входить у гайку. На гайці нарізана зубчаста рейка, до останньої приєднується зубчастий сектор, на валу якого розташована кермова сошка. Зазор між гвинтом і внутрішньою поверхньою гайки заповнений циркулювальними кульками, які перекочуються по гвинтових канавках. Їхнє призначення аналогічне призначенню кульок у кульковальницях: зменшувати тертя.
Перевагами гвинтового механізму є можливість передавати значні зусилля, внаслідок чого він знаходив застосування на великотоннажних транспортних засобах, у той час як рейковий механізм використовується на легкових машинах. З впровадженням посилювачів керма ця перевага перестала бути актуальною, тому на нових автівках цей механізм зустрічається нечасто.
У кривошипному механізмі передача обертального моменту з черв'яка на сошку здійснюється через кривошип. Залежно від кількості шипів кривошипа, спряжених з на канавками черв'яка, розрізняють одношипові і двошипові механізми.
До середини 1940-х років одношипові механізми встановлювалися на автомобілях ЗІС.
.jpg)
Існують і інші кермові механізми, але вони нетипові для автотранспорту. На дитячих іграшках і картах часто використовується прямий зв'язок колонки з кермовими тягами через важіль-гойдалку, на саморобних машинах-«мильницях» і лежачих трициклах також використовуються механізми з коловоротом і штуртросами. Окрім поширеної рейкової передачі, де зубчасте колесо пересуває рейку-кремальєру, існували також механізми із зубчастою передачею з циліндричних і конічних коліс.
Для полегшення обертання кермового колеса і зменшення передавального числа застосовуються підсилювачі керма. Залежно від принципа дії розрізняють гідравлічні, електрогідравлічні (з електронним керуванням гідропідсилювачем), електричні й пневматичні підсилювачі.
Різновидом підсилювача керма є чутливий до швидкості підсилювач, який збільшує інтенсивність на низьких швидкостях. Автомобілісти потребують забезпечення підвищеного кермового зусилля під час маневрування на при паркуванні, а не на високій швидкості. Першим автомобілем з таким підсилювачем став Citroën SM, обладнаний системою Diravi[11], хоча він скоріше змінював не ступінь підсилення, як сучасні системи, а тиск на центрувальний кулачок, чим сприяв «відстрибуванню» керма назад до прямого положення. Сучасні чутливі до швидкості підсилювачі зменшують механічне чи електричне підсилення при підвищенні швидкості, надаючи водієві безпосереднє відчуття керма. Ця схема поступово узвичаюється.
Електронне кермування — сервопривод, кермування за допомогою бортового комп'ютера[12]. Кермовий привод не зв'язаний механічно з кермом, а приймає команди з комп'ютера, що обробляє показання датчиків. Поворот коліс здійснюється серводвигунами.

Недостатнє стернування (англ. Understeer, рос. недостаточная поворачиваемость) — термін, що стосується умов керування автомобілем упродовж повертання, коли справжній радіус повороту, по якому їде автомобіль, більше за радіус, який вказують колеса. Цей ефект протилежний до надмірного стернування.

Надмірна керованість (англ. oversteer, рос. избыточная поворачиваемость) — термін, що стосується умов керування автомобілем під час здійснення повороту, коли справжній радіус повороту, по якому їде автомобіль, менший за радіус, який вказують колеса. Цей ефект відбувається за рахунок втрати зчеплення задніх коліс і може призвести навіть до обертання автомобіля. Цей ефект протилежний до недостатньої керованості.


Пересування локомотивів здійснюється по рейках, які вже забезпечують потрібний поворот (на розгалуженнях вибір напрямку забезпечується стрілками), тому спеціальні кермувальні пристрої на них відсутні (колесо в кабіні, схоже на кермове, служить для керування контролером тяги). Необхідне для повороту диференціювання зовнішніх і внутрішніх коліс забезпечується їхнім характерним профілем у формі зрізаного конуса: при повороті внутрішні колеса котяться по рейці ділянкою меншого діаметру, отже, проходять при однаковому із зовнішніми колесами числом обертів (що неминуче при використовуванні колісної пари, в якої відсутній диференціал) менший шлях. Зміщення залізничного колеса від серединного положення до ділянки найбільшого чи найменшого діаметру становить близько 3 см.
Система кермування суден (стернування) складається з підвішеного на кормі стернового пера, з'єднаного балером з румпелем, який відхиляється або вручну, або за допомогою штурвала (через штуртроси, зубчасту передачу або стернову машину).
Кермування велосипедів, мопедів, мотоциклів, моторолерів здійснюється через кермову колонку, з'єднану з вилкою, в якій закріплене кероване колесо. Велосипедна кермова колонка була застосована і для системи кермування першого автомобіля Benz Patent-Motorwagen 1886 року: важіль на колонці був з'єднаний поздовжньою дягою з важелем колонки одноручної корби, яка заміняла кермове колесо.
Свої особливості має керування уніциклів (що мають єдине колесо, закріплене у вилці) і моноциклів (які не мають вилки, а система кермування розташована всередині колеса).
На відміну від наземних і наводних транспортних засобів, повороти повітряних суден мають здійснюватися в двох площинах: горизонтальній і вертикальній (тангаж), також застосовується поворот відносно поздовжньої осі (крен). Для керування у горизонтальній площині використовують рулі напрямку (приводяться в дію ножними педалями), для керування у вертикальній — рулі висоти (приводяться в дію штурвалом чи ручкою керування), для керування креном — елерони (приводяться в дію штурвалом чи ручкою керування).
- ↑ Коловоріт // Словарь української мови : в 4 т. / за ред. Бориса Грінченка. — К. : Кіевская старина, 1907—1909.
- ↑ а б в Norris, William (1906). Steering. Modern Steam Road Wagons. Longmans. с. 63—67.
- ↑ а б Масленников Р.Р. Лекции по истории автомобильной науки и техники. — Кемерово, 2000. — 175 p. (рос.)
- ↑ Erasmus Darwin's Improved Design for Steering Carriages by Desmond King-Hele , 2002, The Royal Society, London. Accessed April 2008.
- ↑ Автомобиль // Военная энциклопедия : [в 18 т.] : [рос.] / под ред. В. Ф. Новицкого [и др.]. — СПб. ; [М.] : Тип. т-ва И. В. Сытина[ru], 1911—1915. (рос.)
- ↑ Thrust SSC - Engineering. Архів оригіналу за 12 листопада 2010. Процитовано 26 травня 2010.
- ↑ а б Cars | AKC® — Active Kinematics Control — ZF Friedrichshafen AG. www.zf.com (англ.). Архів оригіналу за 7 квітня 2017. Процитовано 6 квітня 2017.
- ↑ AG, BMW. BMW 5 Series Sedan: Driving dynamics & Efficiency. www.bmw.com. Архів оригіналу за 6 квітня 2017. Процитовано 6 квітня 2017.
- ↑ Рулевое управление // Большая советская энциклопедия : у 30 т. / гл. ред. А. М. Прохоров. — 3-е изд. — М. : «Советская энциклопедия», 1969—1978. (рос.).
- ↑ Автомобиль // Большая советская энциклопедия : у 30 т. / гл. ред. А. М. Прохоров. — 3-е изд. — М. : «Советская энциклопедия», 1969—1978. (рос.).
- ↑ Archived copy. Архів оригіналу за 11 травня 2015. Процитовано 28 травня 2015.
{{cite web}}: Обслуговування CS1: Сторінки з текстом «archived copy» як значення параметру title (посилання) - ↑ Олег Татарников, Умные автомобили // КомпьютерПресс 11'2007